Trong lĩnh vực quét 3D và xử lý dữ liệu không gian, CloudCompare nổi lên như một công cụ mã nguồn mở mạnh mẽ dành cho các kỹ sư, nhà khảo sát và chuyên gia GIS. Phần mềm này cho phép thực hiện các thao tác phức tạp trên đám mây điểm (point cloud) như so sánh, phân tích và tái tạo mô hình 3D. Với khả năng xử lý hàng triệu điểm dữ liệu, CloudCompare đã trở thành lựa chọn ưu tiên thay thế các phần mềm thương mại đắt đỏ. Bài viết này sẽ đi sâu vào các tính năng, ứng dụng thực tế và cách tận dụng tối ưu công cụ này.
CloudCompare là gì? Bản chất và lịch sử phát triển
CloudCompare là phần mềm mã nguồn mở được phát triển ban đầu bởi Daniel Girardeau-Montaut tại Pháp, chuyên dùng để xử lý dữ liệu đám mây điểm 3D thu thập từ máy quét laser, LiDAR hoặc ảnh chụp. Phần mềm này hỗ trợ các định dạng phổ biến như LAS, LAZ, PLY, OBJ, và E57. Điểm mạnh cốt lõi nằm ở khả năng so sánh trực tiếp hai đám mây điểm để phát hiện biến dạng, đo lường thể tích hoặc kiểm tra chất lượng bề mặt.
Không giống các phần mềm thương mại như Autodesk ReCap hay Leica Cyclone, CloudCompare mang đến sự linh hoạt với các thuật toán tiên tiến được cập nhật thường xuyên từ cộng đồng khoa học. Nó hoạt động trên nền tảng OpenGL, cho phép hiển thị trực quan hàng tỷ điểm một cách mượt mà. Tính đến nay, phần mềm đã trải qua hơn 20 năm phát triển với hàng chục phiên bản cải tiến.
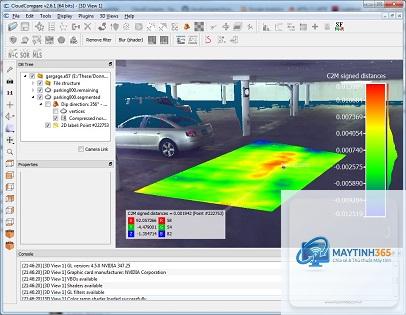
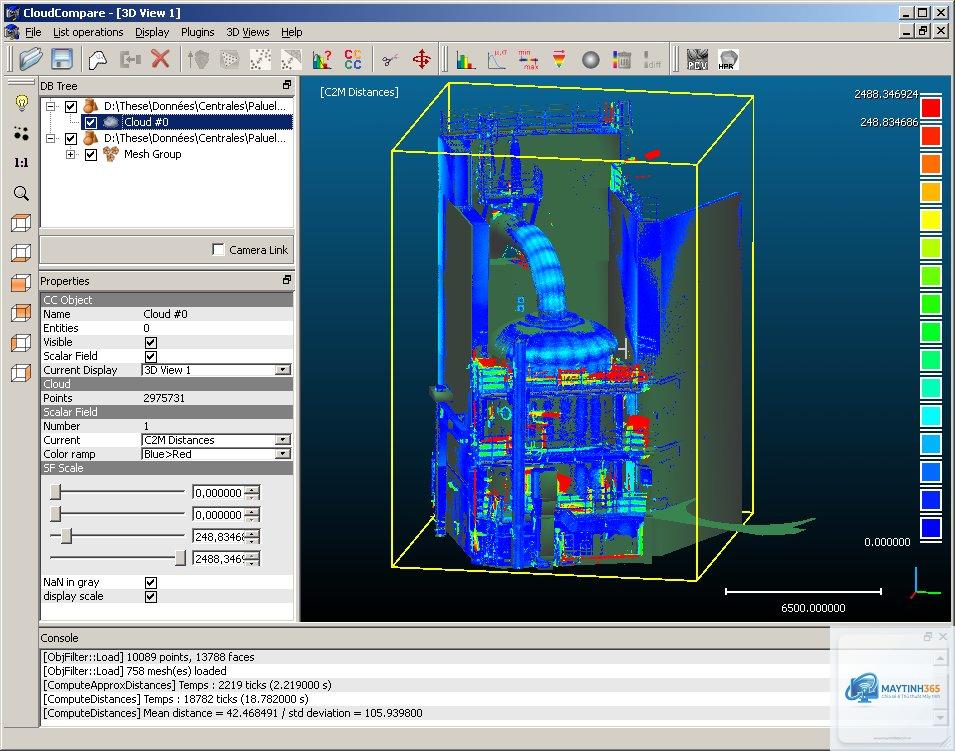
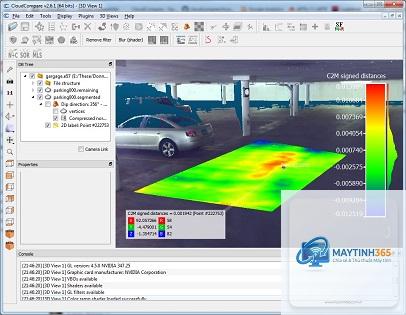
Đây là tính năng trái tim của CloudCompare. Người dùng có thể tính toán khoảng cách giữa hai đám mây điểm tham chiếu và đám mây điểm so sánh. Kết quả được hiển thị dưới dạng bản đồ màu gradient, giúp nhận diện ngay các khu vực có sai lệch. Thuật toán Hausdorff và M3C2 (Multiscale Model to Model Cloud Comparison) được tích hợp sẵn để phục vụ các bài toán biến dạng phức tạp.
Lọc và phân đoạn dữ liệu
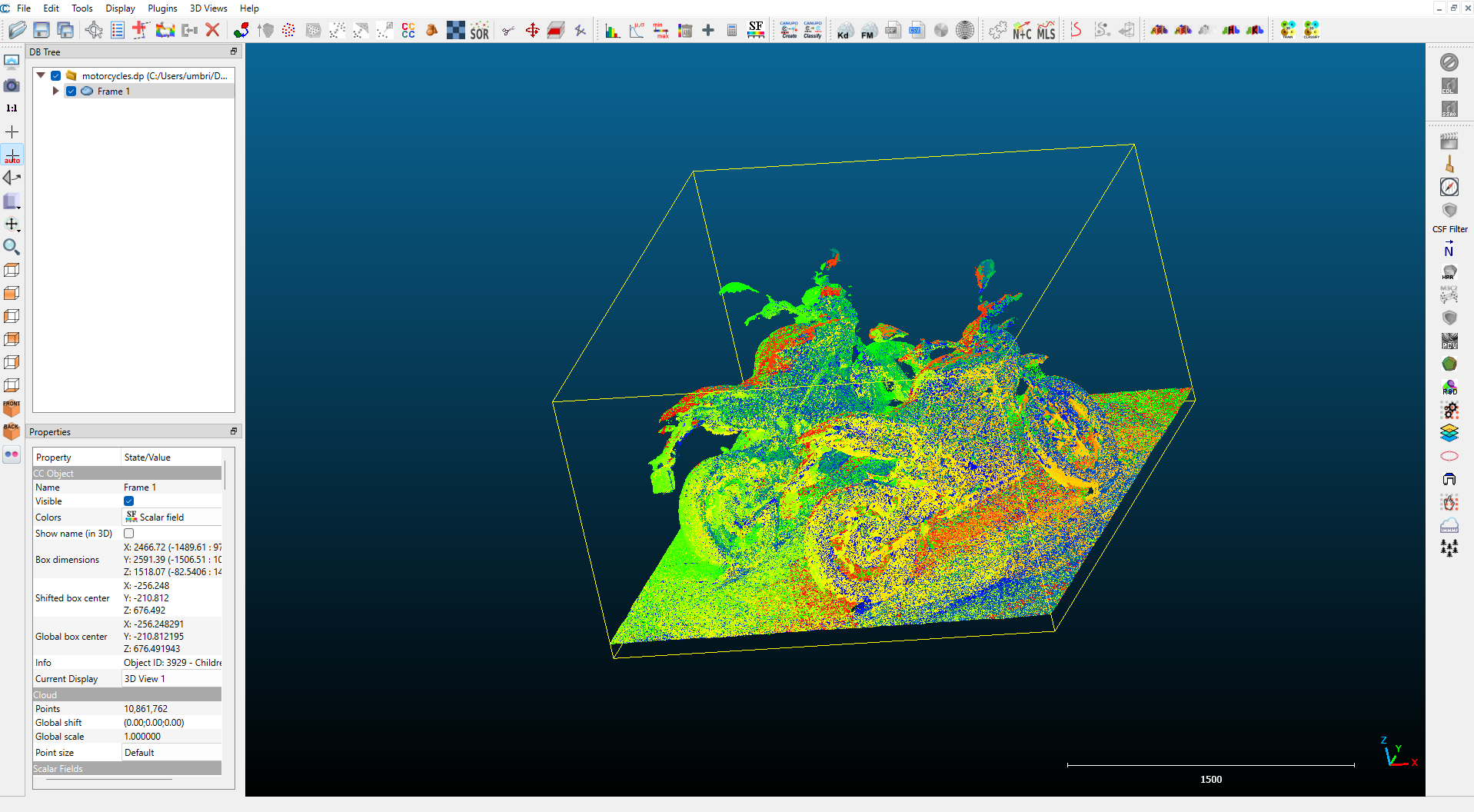
CloudCompare cung cấp các bộ lọc thông minh như lọc thống kê (Statistical Outlier Removal), lọc độ cao, lọc theo cường độ điểm. Công cụ Segmentation (CSF) cho phép tách mặt đất khỏi thực vật hoặc tách các đối tượng riêng lẻ dựa trên hình dạng hình học. Ngoài ra, phần mềm hỗ trợ tạo mặt cắt (cross-section) để phân tích lớp bên trong của dữ liệu.
Tạo lưới và mô hình hóa bề mặt
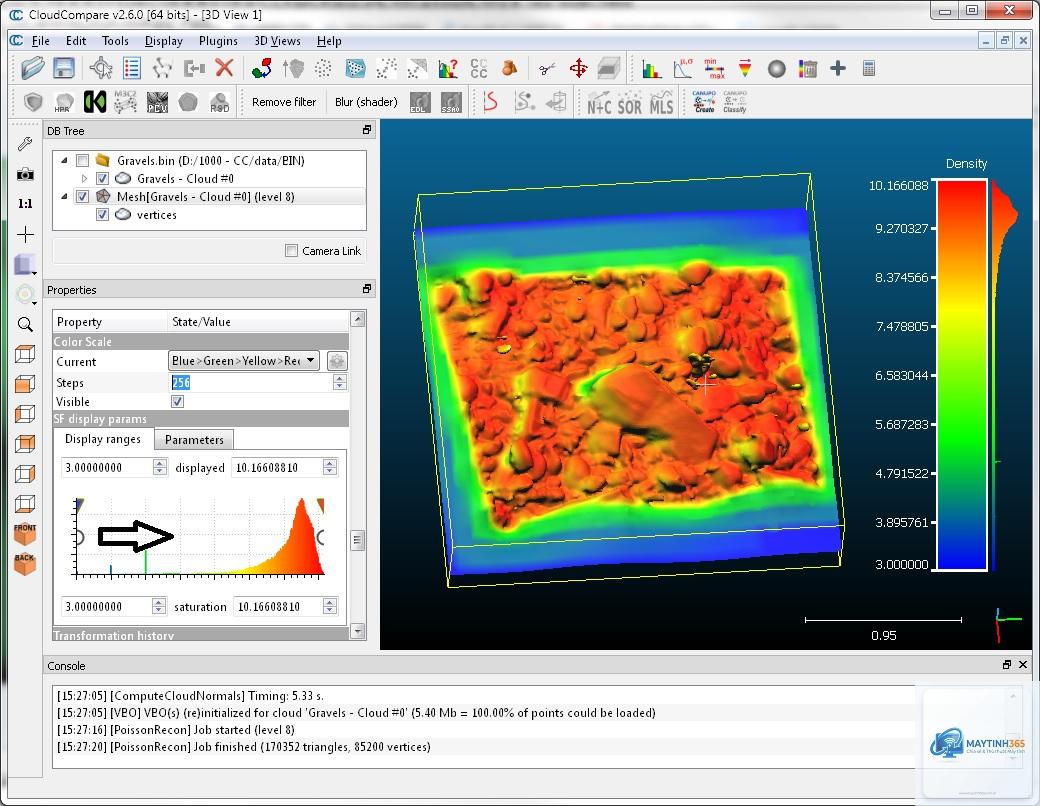
Từ đám mây điểm thưa, CloudCompare có thể sinh lưới tam giác (mesh) bằng thuật toán Poisson Surface Reconstruction hoặc Delaunay 2.5D. Người dùng có thể xuất mô hình sang các định dạng phổ biến như STL, OBJ để in 3D hoặc nhập vào CAD. Tính năng tính toán thể tích giữa hai bề mặt (Volume Computation) giúp xác định chính xác khối lượng đất đá hoặc vật liệu.
Hỗ trợ đa dạng plugin và công cụ mở rộng
CloudCompare có hệ sinh thái plugin phong phú do cộng đồng đóng góp, bao gồm RANSAC Shape Detection (phát hiện mặt phẳng, hình trụ, hình cầu), CANUPO (phân loại điểm), và PCV (Photogrammetric Computer Vision). Người dùng có thể tự phát triển plugin bằng C++ hoặc sử dụng script Python thông qua giao diện dòng lệnh.
So sánh CloudCompare với các phần mềm xử lý đám mây điểm khác
Truy cập trang chủ CloudCompare.org, tải về phiên bản mới nhất dạng.exe. Quá trình cài đặt đơn giản theo wizard, không yêu cầu cấu hình đặc biệt. Khởi động phần mềm, giao diện chính hiển thị với thanh công cụ, cửa sổ 3D và console log.
Nạp dữ liệu và hiển thị
Sử dụng File > Open để chọn file đám mây điểm (ví dụ file.las). CloudCompare tự động scale màu theo độ cao hoặc cường độ. Người dùng có thể xoay, zoom, pan bằng chuột. Để tối ưu tốc độ hiển thị, giảm kích thước bộ đệm Points trong menu Display.
Nạp hai đám mây điểm (đặt một cái làm tham chiếu).
Chọn cả hai trong DB Tree, vào Tools > Distances > Cloud/Cloud Distances.
Chọn phương pháp (thường là Nearest Neighbor).
Kết quả hiển thị bảng màu, có thể xuất báo cáo dạng CSV.
Ứng dụng thực tế của CloudCompare trong các lĩnh vực
Khảo sát địa hình và giám sát biến dạng
Các kỹ sư địa chất sử dụng CloudCompare để so sánh dữ liệu LiDAR qua các thời kỳ, phát hiện sạt lở hoặc lún bề mặt. Với tính năng M3C2, độ chính xác lên đến milimet có thể đạt được. Một ví dụ điển hình là giám sát sườn đồi tại các mỏ lộ thiên, nơi phần mềm giúp cảnh báo sớm nguy cơ trượt lở.
Kiểm tra chất lượng xây dựng (BIM/VDC)
Trong lĩnh vực xây dựng, CloudCompare được dùng để so sánh mô hình BIM với thực tế thi công. Bằng cách chồng lớp đám mây điểm quét hiện trường lên mô hình thiết kế, các nhà thầu phát hiện ngay sai lệch về kích thước cột, dầm hoặc độ nghiêng tường.
Bảo tồn di sản văn hóa
Các nhà khảo cổ sử dụng CloudCompare để tạo bản sao 3D của hiện vật hoặc di tích. Phần mềm cho phép loại bỏ nhiễu từ dữ liệu quét, tái tạo chi tiết chạm khắc tinh xảo trên tượng đá hoặc phù điêu cổ. Nhiều dự án bảo tồn tại châu Âu đã công bố kết quả sử dụng CloudCompare.
Lâm nghiệp và quản lý tài nguyên
Với plugin CANUPO, CloudCompare có thể phân loại thực vật từ dữ liệu LiDAR, tính toán chiều cao tán cây, mật độ cây. Điều này hỗ trợ ước tính sinh khối rừng và lập kế hoạch khai thác bền vững.
Lợi ích và hạn chế khi sử dụng CloudCompare
Lợi ích nổi bật
Miễn phí hoàn toàn: Không giới hạn số lượng điểm xử lý, không lock tính năng.
Cộng đồng hỗ trợ mạnh: Diễn đàn, wiki, video hướng dẫn phong phú bằng nhiều ngôn ngữ.
Khả năng tùy chỉnh cao: Plugin, script, mã nguồn mở cho phép mở rộng không giới hạn.
Thuật toán khoa học: M3C2, RANSAC, CSF được kiểm chứng qua nhiều công bố quốc tế.
Hạn chế cần lưu ý
Giao diện không thân thiện với người mới: Cần thời gian làm quen với khái niệm và thao tác.
Tài liệu tiếng Việt hiếm: Hầu hết hướng dẫn đều bằng tiếng Anh.
Khả năng xử lý dữ liệu khổng lồ: Mặc dù tốt nhưng vẫn phụ thuộc vào RAM và GPU.
Thiếu công cụ quản lý dự án: Không có tính năng version control hay quản lý metadata tiên tiến.
Sai lầm thường gặp khi sử dụng CloudCompare và cách tránh
Sai lầm 1: Không đồng nhất hệ tọa độ giữa các đám mây điểm. Khi so sánh, nếu hai đám mây không được căn chỉnh (align) trước, kết quả sẽ sai lệch hoàn toàn. Luôn sử dụng công cụ Register (ICP) trước khi tính toán khoảng cách.
Sai lầm 2: Sử dụng quá ít điểm trong thuật toán M3C2. Giá trị tham số “Normals” và “Radius” cần được điều chỉnh phù hợp với mật độ điểm của dữ liệu, nếu không sẽ gây nhiễu hoặc mất tín hiệu biến dạng. Tham khảo khuyến nghị từ tài liệu M3C2.
Sai lầm 3: Xuất mesh trực tiếp từ đám mây chưa lọc. Dữ liệu nhiễu sẽ tạo ra bề mặt gồ ghề không mong muốn. Hãy lọc outlier và làm mịn (smooth) đám mây trước khi tái tạo mesh.
Lưu ý quan trọng khi làm việc với CloudCompare
Luôn sao lưu dữ liệu gốc trước khi thực hiện các thao tác chỉnh sửa như crop, subsample hoặc filter. CloudCompare làm việc trên bản sao trong bộ nhớ, nhưng một số plugin có thể thay đổi dữ liệu gốc. Nên thiết lập Scale là Decimal Degrees cho dữ liệu địa tham chiếu để tránh nhầm lẫn đơn vị. Khi xuất kết quả, ưu tiên định dạng ASCII để tương thích với GIS hoặc CAD. Ngoài ra, kích hoạt chế độ double precision (Edit > Preferences > GPU) khi xử lý dữ liệu dự án yêu cầu độ chính xác cao.
Câu hỏi thường gặp về CloudCompare (FAQ)
CloudCompare có thể xử lý được bao nhiêu điểm dữ liệu?
Phần mềm có thể xử lý hàng tỷ điểm tùy vào dung lượng RAM. Với 16GB RAM, có thể làm việc với khoảng 200-300 triệu điểm mà không bị chậm nghiêm trọng. Dữ liệu lớn hơn nên được phân đoạn hoặc sử dụng phiên bản 64-bit.
Làm sao để căn chỉnh hai đám mây điểm trong CloudCompare?
Sử dụng công cụ Tools > Registration > Fine Registration (ICP). Chọn đám mây làm mục tiêu, sau đó chọn đám mây cần căn chỉnh. Điều chỉnh số lần lặp (typically 20-50) và bán kính tìm kiếm. Có thể dùng tùy chọn “Adjust scale” nếu cần.
Tôi có thể xuất dữ liệu từ CloudCompare sang AutoCAD được không?
Có, phần mềm hỗ trợ xuất sang định dạng DXF, OBJ hoặc PLY. Trong AutoCAD, dùng lệnh IMPORT để nạp các file này. Đối với đám mây điểm, nên chọn định dạng PTS hoặc XYZ để giữ nguyên tọa độ.
CloudCompare có hỗ trợ dữ liệu quét từ điện thoại không?
Có, nếu dữ liệu được xuất dưới dạng file PLY, OBJ hoặc LAS. Nhiều ứng dụng quét 3D trên di động như Polycam, Scaniverse có thể xuất ra định dạng tương thích.
Cách khắc phục lỗi hiển thị chậm khi mở file lớn?
Giảm Octree level (Display > Octree level) xuống còn 6-7, hoặc bật chế độ “Hide points” và chỉ hiển thị bounding box. Sử dụng tính năng Subsample để giảm mật độ điểm tạm thời khi duyệt dữ liệu.
Kết luận
CloudCompare là công cụ không thể thiếu đối với bất kỳ ai làm việc với dữ liệu đám mây điểm 3D. Với khả năng miễn phí, tính mở và bộ tính năng mạnh mẽ, nó đáp ứng tốt nhu cầu từ nghiên cứu khoa học đến ứng dụng công nghiệp. Mặc dù có đường cong học tập nhất định, nhưng lợi ích mà phần mềm mang lại vượt xa so với các đối thủ thương mại. Để khai thác tối đa, người dùng nên tham gia cộng đồng CloudCompare trên GitHub và Forum, đồng thời thực hành với các dataset mẫu có sẵn. Bắt đầu ngay hôm nay và trải nghiệm sức mạnh của xử lý đám mây điểm mã nguồn mở.